
ANALIZĂ. Primul clip al accidentului fatal cu mașina autonomă Uber: când tehnologia dă greș, instinctul de conservare ar trebui să evite un astfel de accident
Filmul accidentului din Arizona în care o mașină autonomă experimentală Uber a lovit un pieton care și-a pierdut viața ridică multe semne de întrebare. De ce ar fi trebuit ca tehnologia să evite acest accident și de ce victima este, totuși, principalul vinovat.
La începutul acestei săptămâni, o mașină autonomă experiemntală testată de Uber în Arizona a fost implicată într-un accident în urma căruia Elaine Herzberg, o femeie de 49 de ani, și-a pierdut viața. Mașina - un Volvo XC90 echipat special pentru testele autonome Uber - a lovit femeia în timp ce aceasta traversa neregulamentar un bulevard împingându-și bicicleta.
Accidentul a avut loc pe timp de noapte, mașina rula cu 65 de km/h, iar victima a putut fi observată foarte târziu, apărând în raza vizuală a mașinii cu mai puțin de o secundă înainte de impact. La volan se afla un șofer de test Uber al cărui rol este tocmai acela de a prelua comenzile mașinii în cazul în care sistemele nu funcționează corect.

Acestea sunt datele pe care le știam până acum, alături de o imagine destul de slabă calitativ a mașinii după accident (foto sus). Astăzi, însă, avem primele imagini video ale incidentului. Este vorba de camere aflate în interiorul mașinii Uber implicate în accident care au filmat atât zona din fața mașinii, cât și interiorul acesteia și reacțiile șoferului.
Atenție, imaginile de mai jos pot fi considerate violente
Prima concluzie: accidentul nu putea fi evitat de un șofer
Așa cum declarau încă de marți polițiștii, un lucru este cert: este foarte greu de crezut că acest accident ar fi putut fi evitat, indiferent de modul în care rula această mașină. Victima apare în fața mașinii dintr-o zonă cufundată complet în întuneric, pe mijlocul bulevardului, fără nicio urmă de atenție la mașinile care circulă în acea zonă.
Analiza frame cu frame ne arată că femeia este vizibilă în fața mașinii cu 0.84 secunde înainte de impact, element care face ca orice discuție legată de evitarea acestui accident să fie inutilă: un om reacționează în cel mai bun caz în 0.7 secunde după ce ochii trimit la creier informațiile din fața sa, iar timpul necesar unei eventuale manevre de frânare și de evitare a obstacolului este mult prea scurt în acest caz.
Altfel spus, accidentul nu ar fi putut fi evitat în niciun caz de un șofer uman, ceea ce face ca lipsa de reacție a șoferului de test - care petrece câteva secunde bune înaintea impactului privind în zona bordului - să fie un element foarte puțin important în această discuție. Chiar dacă acesta ar fi fost concentrat și foarte alert, nu ar fi putut detecta și evita la timp pietonul.

Sistemele ar fi trebuit să "vadă" pietonul
Problema este însă faptul că sistemele complexe de camere, radare și lidare de care beneficiază mașinile autonome au exact acest rol: de a evita accidente pe care oamenii nu le pot evita. Acesta este mesajul pe care îl transmit companiile auto, acesta este mesajul pe care îl transmit furnizorii tehnologiilor autonome și acesta este scopul dezvoltării acestei tehnologii: cât timp 90% dintre accidente sunt cauzate de factorul uman, e de așteptat ca mașinile autonome să elimine aceste accidente.
În cazul punctual al acestui accident petrecut în orașul Tempe din Arizona, mașina Uber ar fi trebuit să "observe" pietonul angajat neregulamentar în traversare indiferent de luminozitate. Sistemele responsabile de acest lucru sunt în special Lidar (prescurtare care vine de la expresia Light Detection and Ranging) și Radar.
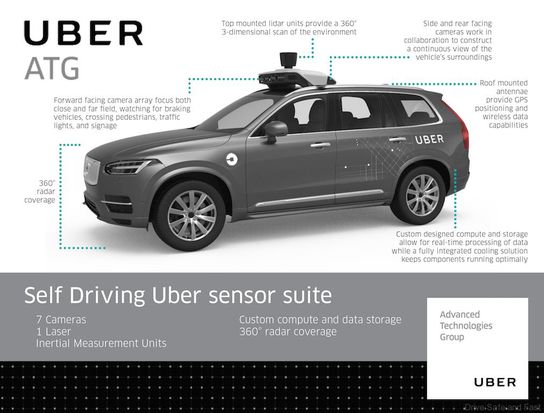
Sistemul Lidar utilizează un laser cu infraroșu pentru a detecta obiecte și pietoni în general în fața și lateralul mașinii. Montate de obicei în zona parbrizului, detectoarele Lidar sunt așezate în cazul mașinilor Uber pe plafon, într-un modul care preia imagini la 360 de grade. Pentru că lucrează în infraroșu, acestea ar trebui să funcționeze corect atât pe timp de zi, cât și pe timp de noapte, ceea ce înseamnă că mașina ar fi trebuit să detecteze pietonul care traversează strada cu mult înainte ca acesta să fie "observat" de ochii șoferului în lumina farurilor.
De cealaltă parte, sistemele Radar - montate de obicei în zona grilei mașinilor cu funcții autonome - transmit fără întrerupere unde radio care, atunci când sunt reflectate de obiecte sau persoane aflate în fața mașinii, transmit un semnal procesat de computer care îi "dictează" mașinii o ilustrație 3D a zonei frontale. Radarele sunt în general foarte eficiente la detecția unor obiecte și obstacole voluminoase - stânci, stâlpi, mașini, și așa mai departe - și mai puțin eficiente când vine vorba de detecția pietonilor. Cu toate acestea, semnalele venite dinspre radar confruntate cu cele dinspre Lidar ar fi trebuit, în mod normal, să-i transmită mașinii că din stânga se apropie un pieton într-un timp îndeajuns de util încât aceasta să inițieze procesul de frânare și eventual de ocolire a obstacolului.

Night Vision ca sistem suplimentar de siguranță
Aceste sisteme de detecție - teoretic perfect funcționale pe mașina Uber implicată în accidentul din Arizona - ar putea fi dublate de sisteme suplimentare, cum ar fi camerele termosensibile, concepute special pentru a detecta animale și pietoni (ființe vii care emit căldură) pe timp de noapte. Acestea sunt de obicei "împachetate" în sistemele Night Vision disponibile în general deocamdată pe mașinile de gamă superioară ale constructorilor premium.
În rest, armatele de camere și de senzori nu sunt extrem de utile pe timp de noapte la detecția pietonilor, fiind mai degrabă soluții utile la detectarea obstacolelor pe timp de zi sau cu o rază limitată de acțiune.
Cine e de vină?
Revenind la cazul mașinii implicate în accidentul din Arizona, Uber și polițiștii americani nu au oferit foarte multe informații suplimentare legate de accident. Dacă însă informația legată de lipsa oricărei tentative de frânare se dovedește reală, este foarte clar fie că sistemele utilizate de Uber pe exemplarul Volvo XC90 implicat în accident nu au funcționat la standarde corecte în acel moment, fie că pe "traseul" teoretic dintre detecție, procesarea computerizată și acțiunea autonomă a mașinii a avut loc un scurtcircuit. În acest caz, consider că mașina este parțial vinovată - măcar la nivel moral, dacă nu legal - pentru acest accident pentru că își "încalcă" principala promisiune: eliminarea accidentelor care pot fi evitate cu ajutorul tehnologiei.
În același timp, însă, este cât se poate de clar că nefericita victimă se află în culpă din cauza faptului că traversa printr-un loc nepermis, pe timp de noapte, fără să se asigure, aruncându-se efectiv în fața unei mașini care circula cu viteză legală. Pentru că indiferent de contextul în care ne vom regăsi în următoarea era a mobilității - uman sau autonom - un minim simț de răspundere și instinctul de autoconservare rămân "legi" după care ne vom ghida cu toții.
Un lucru este cert: pe de o parte, apariția acestui tip de accidente va frâna - cumva normal - viteza cu care sistemele autonome vor putea fi declarate legale pe șoselele din toată lumea. Pe de altă parte, orice tehnologie învață din greșeli.
Oricât de cinic ar suna, un astfel de accident va face ca sistemele tehnologice responsabile de rularea autonomă să fie perfectate și e foarte probabil ca acest tip de incident să nu se mai repete vreodată. Asta în timp ce oamenii vor greși în continuare pe aceleași cauze, indiferent de numărul de accidente identice în care aceștia sunt vinovați direct.
Avantajul autonomelor?






Foarte corect punctul vostru de vedere. Însă vreau să nu uităm, acuitatea vizuală umană este în general superioară filmului înregistrat de camera de bord, deci un șofer atent, concentrat la condus, ar fi observat ceva în mișcare înainte de momentul marcat sus de voi, mai ales că s-au văzut întâi pantofii deschiși în lumina farurilor. Și dacă puțini șoferi ar fi evitat accidentul, cred că mult mai mulți ar fi reușit măcar să apuce să calce frâna și să diminueze forța de impact, ceea ce ar fi însemnat mari șanse să-i fi salvat viața imprudentei femei. Dacă era vorba de un șofer probabil nu i se putea imputa nimic, dar cum ați zis și voi, toate acele sisteme trebuiau musai să detecteze din timp o posibilă coliziune. Mi se pare de neacceptat această excepție pentru o mașină autonomă.